Scurrying Centipedes Inspire Many-Legged Robots That Can Traverse Difficult Landscapes
Tess Malone, Georgia Tech
“When you see a scurrying centipede, you're basically seeing an animal that inhabits a world that is very different than our world of movement,” said Daniel Goldman, the Dunn Family Professor in the School of Physics.
“Our movement is largely dominated by inertia. If I
swing my leg, I land on my foot and I move forward. But in the world of
centipedes, if they stop wiggling their body parts and limbs, they basically
stop moving instantly.”
Intrigued to see if the many limbs could be helpful for locomotion in this world, a team of physicists, engineers, and mathematicians at the Georgia Institute of Technology are using this style of movement to their advantage.
They developed a new theory of multilegged locomotion and
created many-legged robotic models, discovering the robot with redundant legs
could move across uneven surfaces without any additional sensing or control
technology as the theory predicted.
These robots can move over complex, bumpy terrain — and
there is potential to use them for agriculture, space exploration, and even
search and rescue.
The researchers presented their work in the papers, “Multilegged Matter Transport: A Framework for Locomotion on Noisy Landscapes,” in Science in May and “Self-Propulsion via Slipping: Frictional Swimming in Multilegged Locomotors,” in Proceedings of the National Academy of Sciences in March.
A Leg Up
For the Science paper, the researchers were motivated by mathematician Claude Shannon’s communication theory, which demonstrates how to reliably transmit signals over distance, to understand why a multilegged robot was so successful at locomotion.
The theory of communication
suggests that one way to ensure a message gets from point A to point B on a
noisy line isn’t to send it as an analog signal, but to break it into discrete
digital units and repeat these units with an appropriate code.
“We were inspired by this theory, and we tried to see if
redundancy could be helpful in matter transportation,” said Baxi Chong, a
physics postdoctoral researcher. “So, we started this project to see what would
happen if we had more legs on the robot: four, six, eight legs, and even 16 legs.”
A team led by Chong, including School of Mathematics postdoctoral fellow Daniel Irvine and Professor Greg Blekherman, developed a theory that proposes that adding leg pairs to the robot increases its ability to move robustly over challenging surfaces — a concept they call spatial redundancy.
This redundancy makes the robot’s legs successful on their own without the need for sensors to interpret the environment. If one leg falters, the abundance of legs keeps it moving regardless. In effect, the robot becomes a reliable system to transport itself and even a load from A to B on difficult or “noisy” landscapes.
The concept is comparable to
how punctuality can be guaranteed on wheeled transport if the track or rail is
smooth enough but without having to engineer the environment to create this
punctuality.
“With an advanced bipedal robot, many sensors are
typically required to control it in real time,” Chong said. “But in
applications such as search and rescue, exploring Mars, or even micro robots,
there is a need to drive a robot with limited sensing. There are many reasons
for such sensor-free initiative. The sensors can be expensive and
fragile, or the environments can change so fast that it doesn’t allow
enough sensor-controller response time.”
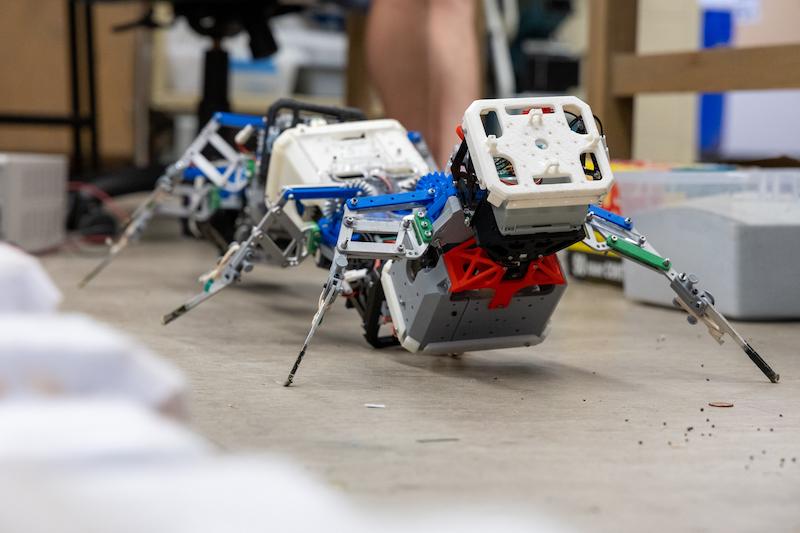
To test this, Juntao He, a Ph.D. student in robotics, conducted a series of experiments where he and Daniel Soto, a master’s student in the George W. Woodruff School of Mechanical Engineering, built terrains to mimic an inconsistent natural environment.
He then tested the robot by
increasing its number of legs by two each time, starting with six and
eventually expanding to 16. As the leg count increased, the robot could more
agilely move across the terrain, even without sensors, as the theory predicted.
Eventually, they tested the robot outdoors on real terrain, where it was able
to traverse in a variety of environments.
“It's truly impressive to witness the multilegged robot's
proficiency in navigating both lab-based terrains and outdoor environments,”
Juntao said. “While bipedal and quadrupedal robots heavily rely on sensors to
traverse complex terrain, our multilegged robot utilizes leg redundancy and can
accomplish similar tasks with open-loop control.”
Next Steps
The researchers are already applying their discoveries to
farming. Goldman has co-founded a company that aspires to use these robots to
weed farmland where weedkillers are ineffective.
“They’re kind of like a Roomba but outside for complex ground,” Goldman said.
“A Roomba works because it has wheels that function well
on flat ground. Until the development of our framework, we couldn’t confidently
predict locomotor reliability on bumpy, rocky, debris-ridden terrain. We now
have the beginnings of such a scheme, which could be used to ensure that our
robots traverse a crop field in a certain amount of time.”
The researchers also want to refine the robot. They know
why the centipede robot framework is functional, but now they’re determining
the optimal number of legs to achieve motion without sensing in a way that is
cost-effective yet still retains the benefits.
“In this paper, we asked, ‘How do you predict the minimum
number of legs to achieve such tasks?’” Chong said. “Currently we only prove
that the minimum number exists, but we don't know that exact number of legs
needed. Further, we need to better understand the tradeoff between energy,
speed, power, and robustness in such a complex system.”
CITATION:
Baxi Chong et al., Multilegged matter
transport: A framework for locomotion on noisy landscapes.Science380,509-515(2023).DOI:10.1126/science.ade4985